


Remarks:
Gripper Fingers also known as Finger Grippers are designed to engage with a part by flipping the fingertip behind a part or gripping the part’s edge.
Common applications for gripper fingers
-
Supporting vacuum cups when a part sticks in the mold
-
When the part geometry does not allow the use of vacuum cups or grippers
-
Holding the part in place during high speed robot movements
-
Holding the part in place if the part is transferred to a secondary operation i. e. de-gating station
-
Used in fixtures to clamp a part in place
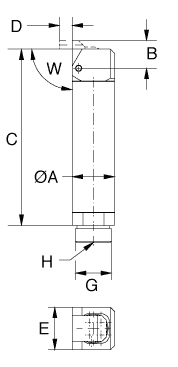
>ASS< gripper fingers are single action, spring return. Featuring magnetic pistons for sensing open / close with optional sensor clamps and sensors
To achieve the max holding force 87 PSI air pressure is required. A cam locking version GFD is also available
| Part No. | Description | A [mm] | B [mm] | C [mm] | D [mm] | E [mm] | G [mm] | W Min. [°] | H ["] | Closing ForceMax. [N] | X- System | JU-System | Weight [g] |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1-451-09-00 | GRF-14-90 VA | 14 | 9 | 58 | 6 | 14 | M12x1 | 90° | M5 | 40 | x | x | 23 |
| 1-450-15-00-1 | GRF 20-90 VA | 20 | 13 | 83 | 6 | 20 | M17x1 | 90° | G1/8 | 100 | x | x | 57.7 |
| 1-450-29-00-1 | GRF 30-90 VA | 30 | 20 | 123.5 | 11 | 30 | M27x1 | 90° | G1/8 | 230 | x | x | 193.9 |