
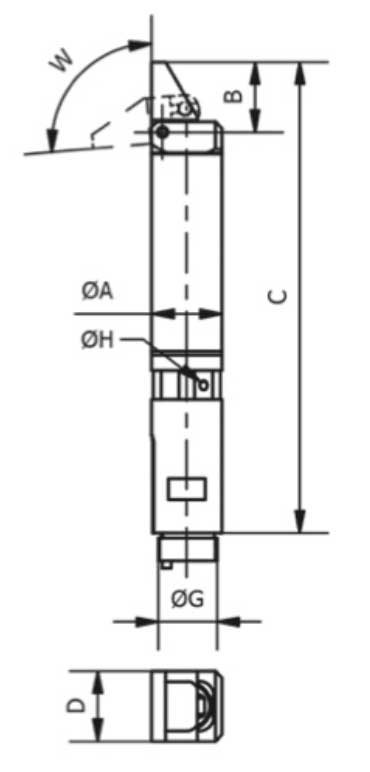

| Part No. | Description | A | B | C | D | G | H | W | CLOSING FORCE | WEIGHT |
|---|---|---|---|---|---|---|---|---|---|---|
| 1-450-41-00 | GRF 20-95 VA P | 20 | 20 | 134 | 20 | M17x1 | M3 | 95 | 45 N | 120 g |
| 1-450-42-00 | GRF 20-95 VA P EP | 20 | 20 | 134 | 20 | M17x1 | M3 | 95 | 45 N | 120 g |
This part sensing gripper finger is useful whenever it’s mission critical that verification of the part being positively nested in a fixture or End-of-Arm-Tool is needed.
How it works: VIDEO
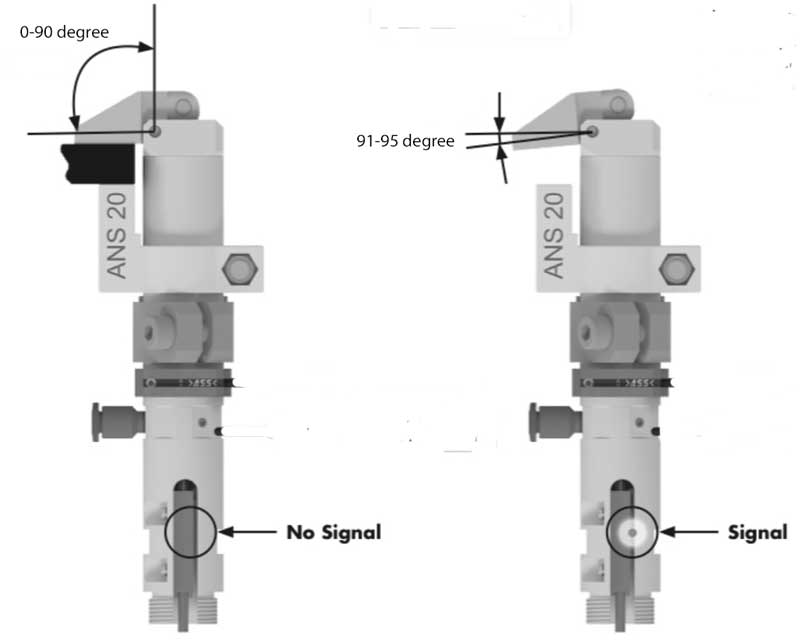
The gripper finger is pneumatically actuated and spring return. The fingertip swivels 95 degree. The factory setting for triggering the sensor is 91° When the fingertip is fully engaged (91°-95°) the built-in sensor will send a signal indicating one of 2 things, depending on the application. 1) The part is not present or 2) The part is fully nested at the specific location in a fixture or nest.
NPN versions are available on request. The gripper finger has 3 pneumatic ports (M3) near the bottom of the barrel. The ports are spaced 120° apart. Two M3 plugs and a M3 VSL fitting for 4mm hose, as shown in one of the photos, are included as well as a size 1 metric hex key for installing the plugs. The length of the sensor cable is 2 meter (6′) and has leads (no plug)
The available EP Soft Touch coating consists of a high strength Elastomere Polyurethane and is applied in a proprietary multi step process in our factory. This coating is abrasion and slip resistant and silicone free. It dramatically reduces or even eliminates marking of high gloss or other sensitive surfaces. EP working temperature is 194F ( 90 C ) and short term temperature resistant of up to 266F ( 130 C )